SMAVE
VIRTUAL SYSTEM
针对虚拟目标机定义与配置、数据激励与采集、 测试用例的设计、管理与执行、软件
代码的开发与调试等需求,提供一体化的设计验证支持
ACEphere Motion Control
除了逻辑程序之外,许多机器和工厂需要一个通用的控制器来控制运动序列。由于现代处理器平台的高性能,运动控制和机器人任务可以在与逻辑控制相同的设备上处理。借助ACEPHERE的开放架构,可以连接甚至集成用于运动规划和控制的外部工程工具。
SMAVE Virtual System可无缝集成硬件使用人员和软件开发人员对于虚拟目标机定义与配置、数据激励与采集、 测试用例的设计、管理与执行、软件代码的开发与调试等需求,提供一体化的设计验证支持,可实现针对目标系统的目标码、源代码覆盖率统计分析及软件性能分析;通过灵活的设备模型配置,可满足不同的系统应用场景。
ACEphere Motion Control使得 运动控制更加简单
逻辑和运动控制只需要一个单一的硬件设备,两个应用程序组件可以用一个和相同的开发系统来设计。与传统系统相比,一致的操作结构使得运动任务的工程更加容易和灵活。
ACEphere Motion Control
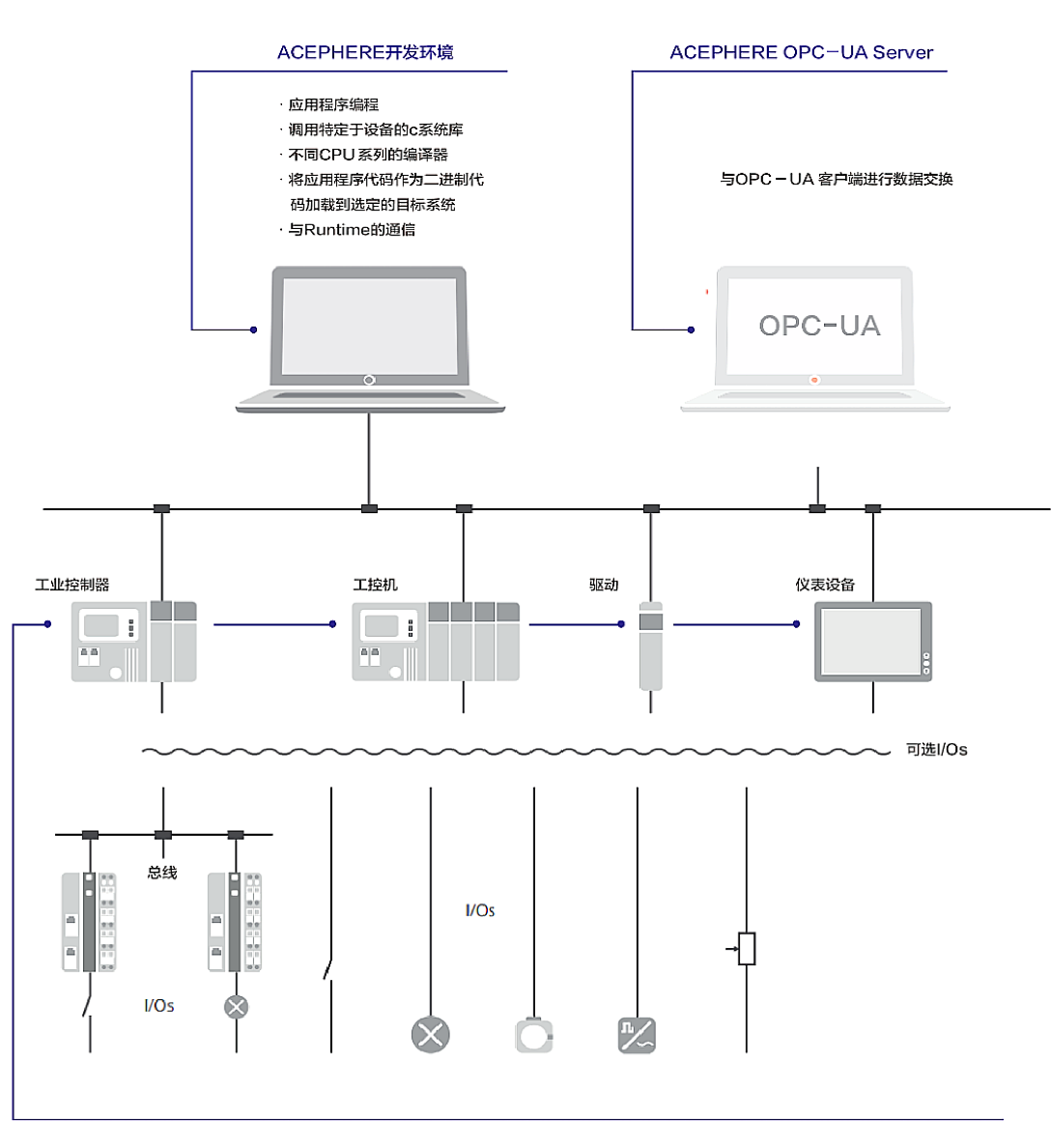
使用ACEphere Motion Control可以实现从单轴运动到多维数控路径插补和机器人控制,用户可以在熟悉的开发界面中为逻辑控制器实现各种运动控制任务。ACEphere Motion Control在ACEPHERE开发环境中以开发工具包的形式提供运动控制功能。在ACEPHERE环境中,可以用IEC 61131-3语言甚至Simulink模型工具解决任何复杂的任务。
理想的运动控制平台
ACEPHERE可为运动控制提供所有核心功能
■ 集成运动库的设计依赖于动态且易于使用的运动控制功能
■ 用于各种处理器平台的集成编译器,使跨系统部署的产品无需额外定制
■ 集成现场总线支持,使驱动器和I/O组件的配置更加便利
■ 从驱动和总线系统中提取运动工程,基于IEC 61131-3数据结构后,将非常适合仿真、测试、调试以及机械结构的改进
■ 设备制造商易于集成额外的配置和规划工具,例如运动编辑器或特定驱动器,可将所有工程组件完全集成
■ 集成可视化简化了仿真、测试和调试,可一体化完成所有工作而不需要其他的额外组件
控制功能
伺服驱动器
■ 运动控制器周期的为伺服驱动器提供轨迹基
■ 驱动采用伺服驱动控制
步进驱动器
■ 运动控制器通过脉冲/方向接口控制步进驱动器
■ 脉冲计数器向运动控制器报告位置
■ 完成运动控制器中的位置控制
变频器
■ 运动控制器指定变频器的期望转速
■ 传感器,如旋转编码器,报告位置
■ 运动控制器中的位置控制
运动学轴组
■ 运动控制器为轴组伺服驱动提供目标点和轴动力学约束
■ 驱动采用伺服驱动控制
ACEphere Motion Control优势
机器人应用程序的通用实现
使用轴组参数配置和运动控制功能块来进行
没有固定的限制
轴的数量和更新频率仅依赖于控制器的计算能力、内存大小以及使用的总线类型,可完全软件定义
运动控制的编程不依赖于驱动
驱动改变不影响既有软件
可移植到不同平台
使用IEC 61131-3语言创建运动控制库和应用程序ACEPHERE能够为不同的目标系统编译运动控制程序
ACEPHERE开发环境集成
使用同一套工具和硬件可以实现逻辑应用、运动控制应用,从而降低成本
设备制造商与用户的应用
设备制造商使用ACEPHERE来提供各种类型的可编程设备,从而为用户提供完整的自动化系统。通过ACEPHERE自动化平台,设备制造商可以定制包括功能库、应用程序模板以及自己的组件,从而能够用ACEPHERE实现针对特定设备或应用程序的开发系统。
ACEphere Motion Control 的使用
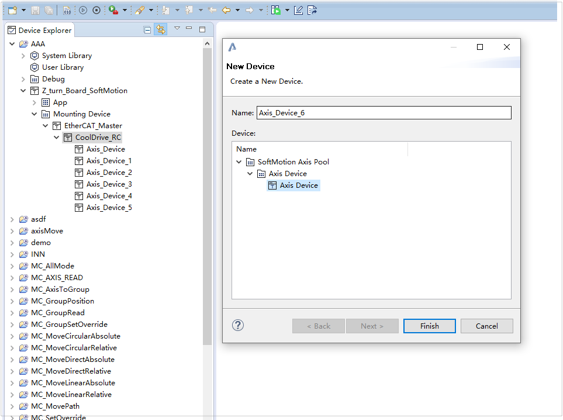
驱动器的配置和调试
■ 为ACEPHERE项目添加必要的总线系统:支持CANopen、EtherCAT,以及其它标准系统,如步进驱动器和模拟控制驱动器
■ 可自行添加需要的驱动器
■ 设备名称表示隐式提供的设备描述文件,为每个驱动器抽象数据,允许驱动器和驱动器总线之间进行无缝数据交换
■ 通过设备的对象目录配置总线和驱动器特定的参数
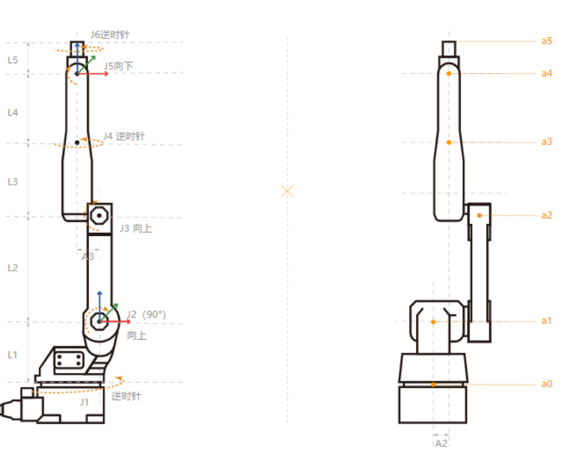
点到点和连续路径运动的机器人应用
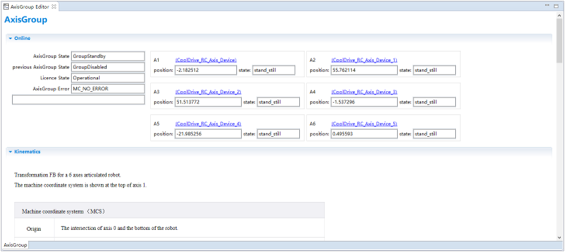
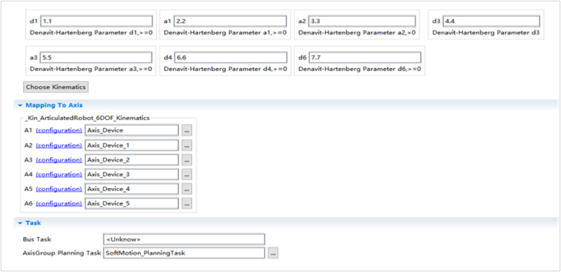
■ 可以方便的配置预定的运动学模型的轴组参数
■ 将机器人在不同坐标系下的位置坐标值整合为运动动作规划
■ 函数库和程序块是基于PLCopen国际规范实现
■ 提供大量常用的运动学模型的支持
| Machine coordinate systerm (MCS) |
| Origin |
The intersection of axis 0 and the bottom of the robot |
| X | Points "foward" towards the tool center point |
| Y | Defined by X and 2 so that the MCS becomes right-handed |
| Z | Points upward |
在运动控制器上调试运动应用程序
可进行运动控制程序的编译、下载和执行,将以最高性能状态进行执行

额外的工具
■ POU可视化模板,便于在线操作和参数化
■ ACEPHERE允许通过实际控制应用程序,进而在开发环境中轻松地进行可视化运动
■ 可通过ACEPHERE开发环境调试运动应用程序(运动程序作为控制器的子任务运行)
运动控制的规划和执行
根据PLCOpen for Motion Control国际规范,在ACEPHERE项目中建立运动控制功能块(例如MC_Power, SMC_GroupPower, MC_MoveAbsolute或MC_MoveVelocity等)
POU的参数是IEC 61131-3变量,可以在运行时更改(例如通过逻辑应用程序或从用户界面输入)
单轴与多轴的运动控制
■ 使用可用的IEC函数和运动控制函数进行编程编程
■ 运动控制库包括PLCopen规范中定义的单轴、多轴的运动学模型库
■ 通过图形化功能块连线的方式编辑运动控制的逻辑应用程序
■ 特定的可视化模板,便于ACEPHERE开发环境的调试
行业应用